FIGURE 1 - SCHÉMA ELECTRIQUE
Description de l’application :
But : Commander automatiquement l’ouverture et la fermeture des volets roulants en fonction de la pénombre.
Très intéressant lorsque vous partez en vacances, les plantes continuent à avoir de la lumière et pour les voleurs la fermeture et l'ouverture des volets peut-être dissuasif.
Un interrupteur permet de neutraliser le fonctionnement automatique. La commande par les 2 boutons poussoirs est conservée, elle est opérationnelle tout le temps.
Chaque volet est autonome en mode bouton, l’ouverture ou la fermeture de l’ensemble des volets de l’habitation s’effectue automatiquement suivant les réglages de chaque carte RX. Le pilotage de la carte est fait par un microcontrôleur PIC 18F2550 qui commande des relais afin d’avoir une sécurité entre la commande manuelle et la commande du PIC. En mode volet automatique, les boutons poussoirs ne sont pas alimentés. Il n'y a donc aucune chance de griller un moteur si l'un des boutons poussoirs et enclenché à l'inverse de la gestion automatique.
L’ensemble de l’électronique est logé dans une boîte encastrée dans la cloison à 1,35m de hauteur à droite ou à gauche de la porte-fenêtre ou de la fenêtre. Les boutons poussoirs montée/descente manuels seront fixés sur la boîte ou à leur emplacement d'origine.
Un mini interrupteur permet de neutraliser la commande automatique. L’électronique permettra d’adapter le temps des commandes ouverture et fermeture en fonction de la longueur des volets (4 temps différents). Ces temps peuvent être ajustés pour des volets hors standard (à me préciser). Le système ne devra pas être perturbé par une coupure de courant et être insensible aux perturbations électriques.
Les commandes manuelles seront toujours disponibles même en Auto, (permettre de baisser les volets en journée pour faire écran au soleil, pour exemple).
Recommandations : Il est impératif que les fins de courses des volets roulants soient bien réglés. Si le montage des volets est récent, vérifiez le fonctionnement sans l’électronique pendant 2 semaines minimum.
Ensuite seulement raccordez l'électronique.
Attention: l’électronique comporte des éléments sous tension de 220V, celle-ci doit être correctement protégée pour éviter les contacts directs ou indirects avec le corps humain. Intégration dans un boîtier isolant et continuité de mise à la terre. N’entreprenez cette réalisation que si vous maîtrisez l’électronique de puissance.
L'auteur ne se tient pas responsable pour les dommages causés aux biens ou aux personnes. Chacun est libre d'entreprendre ou non ce montage suivants ses compétences, que lui seul connait.

FIGURE 2 - RACCORDEMENT ELECTRIQUE
Les raccordements de chaque bouton seront faits suivant le schéma ci-dessus. Surtout ne changer rien sous peine de déboire. Si vous ne comprenez pas le dessin, faites vous le expliquer par un proche compétent.

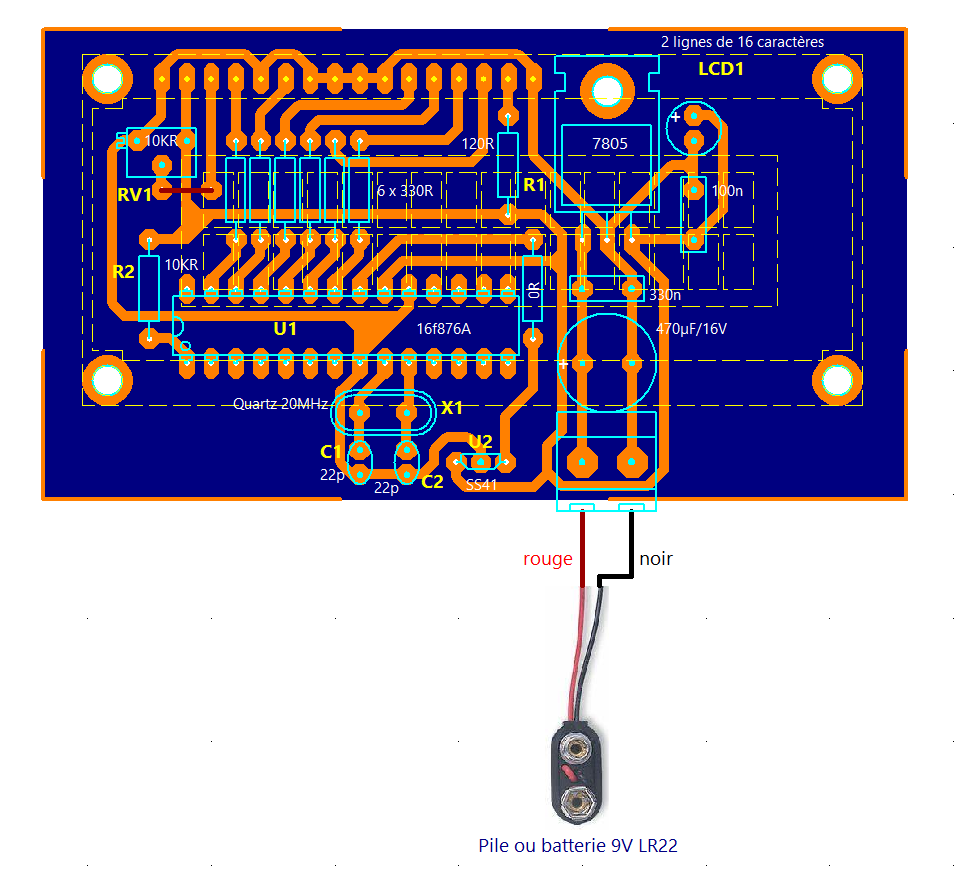
FIGURE 3 - IMPLANTATION DES COMPOSANTS TX
C'est une télécommande 1 voie réalisée à partir du module HF 433 MHz et d'un microcontrôleur PIC 18F2550. Elle peut être utilisée pour commander des volets roulants. Une LDR permet de donner au PIC la luminosité ou la pénombre au récepteur qui commande les relais correspondants à la montée ou à la baisse des volets roulants.
L’émetteur et le récepteur sont réglés pour fonctionner correctement à 433,92 MHz. L'émetteur peut être alimenté en 5V à cause du PIC et le récepteur n'accepte que 5V est commun pour le microcontrôleur PIC sur cette carte donc pas de problème d’interfaçage. Néanmoins si on veut profiter de la puissance maximale de l’émetteur il faudrait alimenter l'émetteur en 12V. L'ajoute d'une antenne de longueur 34 à 36 cm ( ¼ de l’onde) pour l'émetteur est indispensable. Ces Modules utilisent la modulation d’amplitude (Amplitude Shift Keying - ASK) et utilisent une bande passante de 1 MHz.
L'antenne sera fabriquée dans du fil émaillé de 1 mm roulé sur un diamètre de 8 à 10 mm à spires jointives.

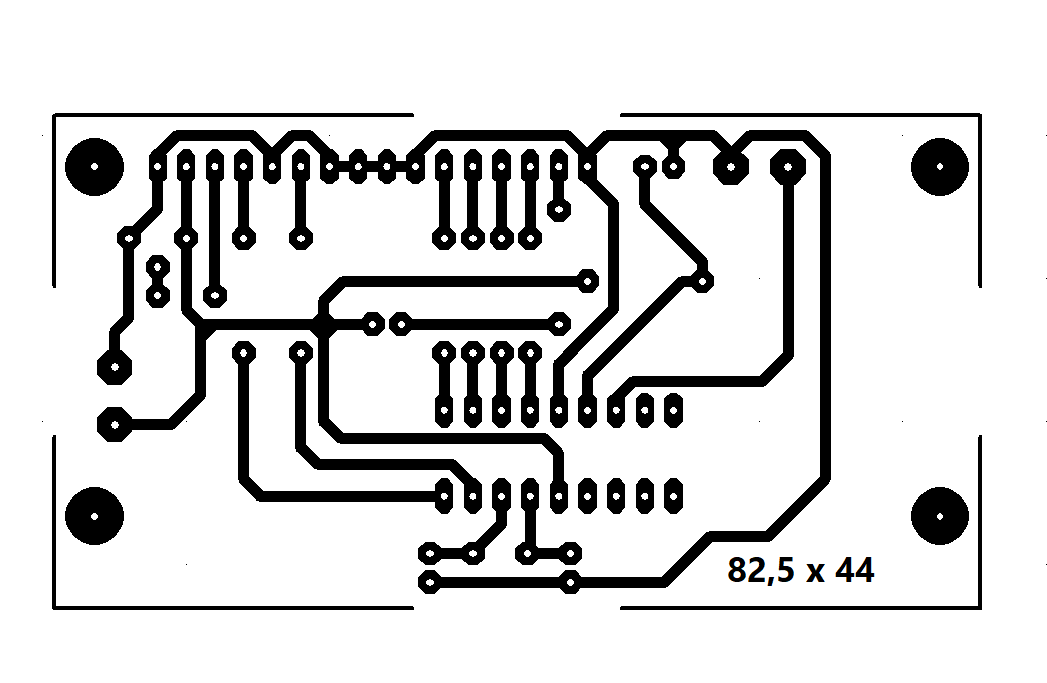
FIGURE 4 - PCB TX (VUE COTE CUIVRE)

FIGURE 5 - IMPLANTATION DES COMPOSANTS RX

FIGURE 6 - PCB RX (VUE COTE CUIVRE)

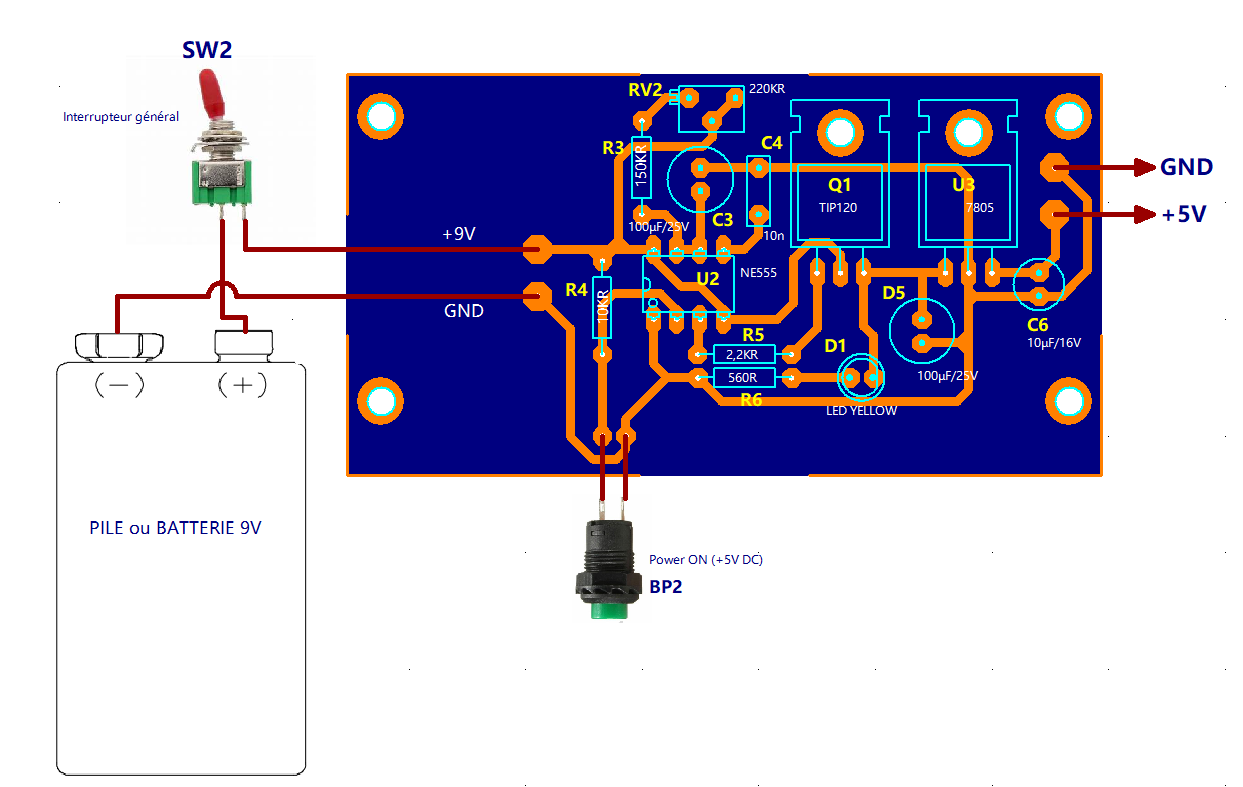
FIGURE 7 - IMPLANTATION ALIMENTATION RX
Le pont de diodes BR1 peut-être tous ponts ronds 50V 2A. Les refroidisseurs sont de chez TME sous la réf. HS-001. Ils peuvent être remplacés par des refroidisseurs pour TO220 avec des dimensions similaires. La diode LED D1 peut ne pas être câblée. Le transformateur portant les références indiquées est aussi de chez TME, rien ne vous empêche d'en trouver un ailleurs entrant dans cet encombrement Pour le reste, il n'y a rien à dire. A noter que contrairement à mon habitude, le PCB est vu coté cuivre.
Pour l'alimentation RX prévoir un interrupteur pour couper l'alimentation en cas d’absence prolongée. Couper de préférence le 220 V~ (phase).

FIGURE 8 - PCB ALIMENTATION RX (VUE COTE CUIVRE)
Ceci donne un aperçu de la réalisation. Les internautes voulant fabriquer ce montage ou avoir des renseignements complémentaires pourront me le faire savoir. Pour le fabriquer, il sera donné par mail les copies du circuit imprimé à réaliser (le tout mis à jour), ainsi que le firmware du PIC (seulement si des internautes sont intéressés).
Mon adresse mail : mickvarenne2@gmail.com